ARPH : Assistance Robotique aux Personnes Handicapées
L'équipe
|
Etienne Colle, Professeur |
Responsable du projet |
|
Philippe Hoppenot, MdC |
Initiateur du projet |
|
Simon Galerne, MdC |
Encadrement de Yves Rybarczyk |
|
Omar Ait Aider, doctorant |
Localisation à partir de caméra de la base mobile dans son environnement en temps réel |
|
Yves Rybarczyk, doctorant |
Thèse bi-disciplinaire - psychologie expérimentale, robotique |
|
Samir Otmane, post doc |
Interaction Homme-Machine |
Le projet
L’aide aux personnes handicapées moteur se développe depuis quelques années. La robotique mobile peut y apporter sa contribution. Défini en lien avec l’Association Française contre les Myopathies (AFM), l’objectif du projet ARPH est d’embarquer un bras manipulateur sur une base mobile autonome pour donner aux personnes handicapées la possibilité de réaliser seules des tâches de la vie quotidienne.
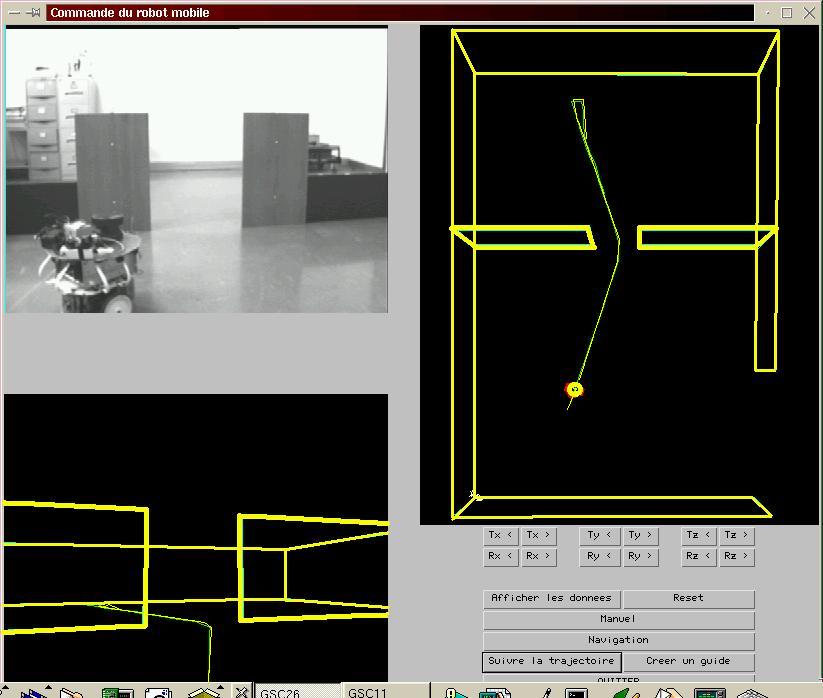
De tels projets ne sont envisageables qu'avec deux contraintes. La première est de bien définir le besoin réel d'une personne handicapée. En particulier, l'AFM insiste sur la volonté de l'opérateur humain d'agir par lui même : le robot ne doit donc pas "faire à la place" de la personne mais pallier ses déficiences. La seconde contrainte est financière. En effet, le coût de l'assistance doit être suffisamment faible pour que des personnes handicapées puissent y accéder. Cela impose en particulier des choix quant aux capteurs utilisés : odométrie et capteurs à ultrasons avec des capacités télémétriques moyennes. Une caméra a été rajoutée pour le retour d'information à l'utilisateur, la localisation et la commande du robot.
Ce domaine de recherche conduit naturellement à s'intéresser à la Coopération Homme-Machine (CHM). En effet, les deux entités (homme et machine) ont des capacités de perception, de décision et d'action. La première étape du travail a consisté à analyser l'autonomie possible de la base mobile (planification de trajectoire, navigation, localisation). Ce travail est décrit dans mon mémoire de thèse et a donné lieu à plusieurs publications. La planification et la navigation sont actuellement satisfaisantes. Le travail sur la localisation se poursuit avec la thèse d'Omar Ait Aider.
La seconde étape est la mise en place de la CHM proprement dite. Les différentes tâches à réaliser sont réparties entre les deux entités afin que la mission se réalise dans les meilleures conditions de satisfaction pour l'opérateur. La détection des erreurs de localisation, la commande de la base mobile et du bras manipulateur sont des tâches effectuées en collaboration entre l'homme et la machine. La commande de la base mobile s'effectue à l'aide de trois types de modes de commande. En manuel, l'opérateur pilote directement la base mobile. En automatique, l'opérateur ne définit que la mission ; le robot la réalise automatiquement. Les modes partagés représentent toutes les combinaisons possibles des deux modes précédents. La passage du mode automatique au mode manuel et l'utilisation des modes partagés nécessitent que l'opérateur comprenne les comportements automatiques du robot. Ils le sont d'autant plus qu'ils se rapprochent des comportements humains dans une situation identique. C'est le travail de thèse d'Yves Rybarczyk.
Une Interface Homme-Machine (IHM) évolutive est aussi à l'étude pour s'adapter à chaque personne en fonction de son handicap, de son état de fatigue, des capacités du robot et de l'état actuel de la mission en cours. Elle est basée sur l'interface ARITI, développée au laboratoire avec des techniques de réalités virtuelle et augmentée.